
前言
本次主要是介绍,在计算整车基本参数信号时,无法避免的整车动力学模型和轮胎模型;一直以来不太明白的主要是以下问题:
在计算滑移率时,各个车轮的轮心速度与整车速度之间的关系?整车的动力学模型与轮胎模型之间的作用关系?
结合一些论文和网上参考的坐标系相互关系,将结论整理总结下。
整车动力学模型
在混合动力能量管理策略的开发过程中,所涉及的模型更多的是为了考虑能量优化问题。
即:控制速度的驾驶员模型、动力系统各零部件的查表模型以及待验证的分配策略;
而在动力学领域,这里的模型更多的是扭矩、受力分析以及速度合成,来计算纵向和侧向的运动参数。用于估算基础信号,如:质心侧偏角等。
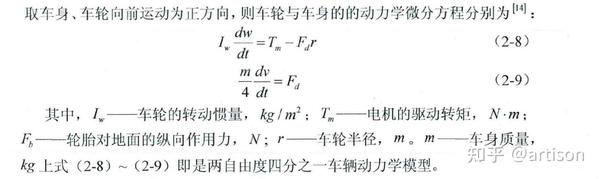
这里以论文[1]中的七自由度模型来做分析总结:
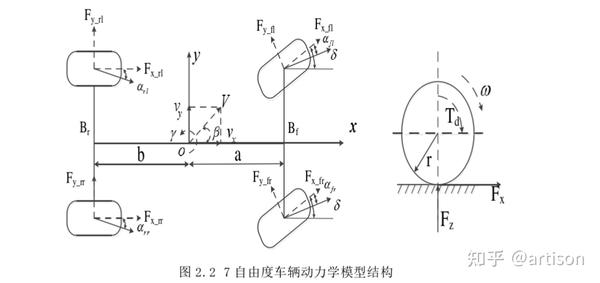
图1 整车七自由度动力学模型
七自由度模型的分析维度:纵向(X)、侧向(Y)、横摆(Z)和四个车轮的转动;
而轮胎作为车辆与地面交互的媒介,轮胎模型则用于计算车辆受力,进而在整车动力学模型中计算如上不同维度的运动规律;
在计算之前,我们对如上的符号、坐标系以及常用的角度定义进行说明:
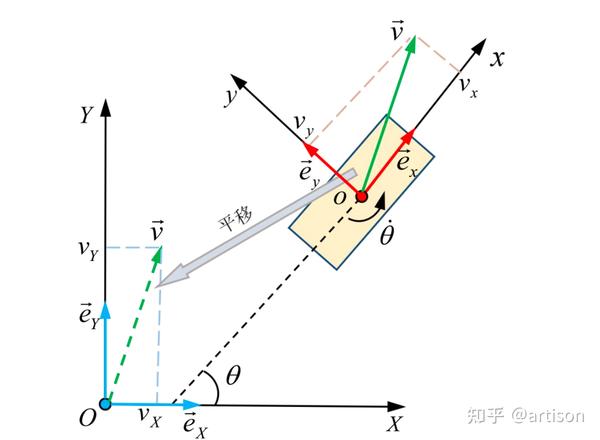
图2 车辆坐标系与大地坐标系质心侧偏角:质心速度与车辆x轴的夹角;横摆角:车辆x轴与大地X轴的夹角;航向角:质心速度与大地X轴的夹角;轮胎侧偏角:轮心速度与轮心纵向速度之间的夹角;轮胎受力:沿轮胎中心方向为纵向力Fx,垂直于Fx方向为侧向力Fy(x轴正向为车体纵向的正向,y轴向左为车体侧向的正向);动力学模型中的符号定义:gamma为车辆横摆角速度(即图2中的theta的变化率,模型中延时求差并滤波即可);delta为前轮转角;
推导的假设:
坐标系方向规定;前轮转向,且左右轮的转角相同;
一些符号介绍完毕后,开始实际推导:
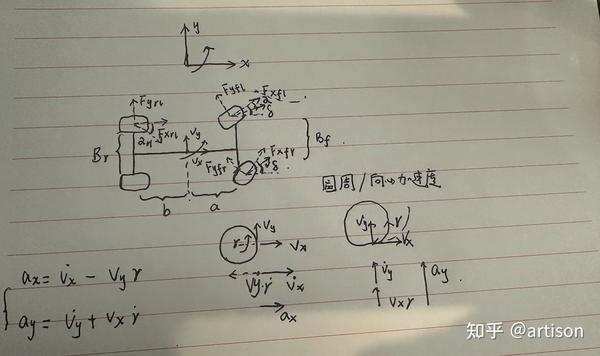
首先,分析x方向的受力与加速度关系:
(1)关于式2-1,由于最初理论力学以及坐标旋转的东西全都已经归还校园,因此最开始并不是很清楚。论文只是一句,“根据达朗贝尔定理
这里呢,关于式2-1,可以按照图2及网上关于坐标系的变换会更加清楚,总结即是:
[1]在转向时,由于横摆角速度的存在,即车辆转向时,车辆坐标系与大地坐标许存在旋转关系,即旋转矩阵(关键词触发);
[2]简单理解时,即ax与ay分别为最终x方向和y方向的加速度,包含了速度变化与旋转导致的变化两部分。也可以使用右手定理来做分析得出;
具体,可以参考这位大佬的推导理解:
(2)关于2-2式,受力分析即可;
在实际策略中,vx、vy以及ax均可通过传感器测量得到;
而vx的计算则依赖于轮速和加速度传感器,在未打滑时,非驱动轮的速度接近于实际车速;车辆打滑时,可以通过积分来进行车速的计算;
2. 接下来,是侧向的受力与加速度关系:
式2-3与2-4的推导与上述相同,
不嫌弃的话,可以按照如下的理解来记忆和推导:
3. 然后,是Z方向的横摆运动:
这时,就需要按照理论力学中的方式,进行力矩的合成:

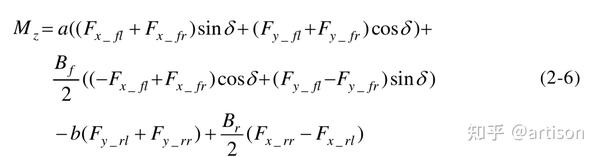
首先,先说下式2-5,一个平常的公式:转动惯量*角加速度=力矩;
1. 引申一种场景,在打滑时,已知最大驱动扭矩或当前路面附着允许的驱动扭矩,即可以计算出允许的角加速度变化阈值,即判断车辆是否开始或可能会打滑[2]; 2. 进一步,每个电机的扭矩步长存在限制,这个公式的一阶,可以求出角加速度的变化率的限制值;
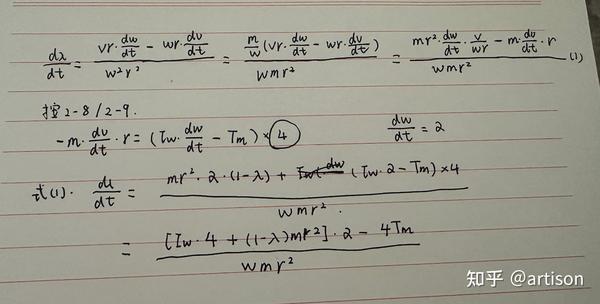
如上的论文中,在设计控制策略时,对滑移率、角加速度和电机扭矩进行了推导分析,截取当时印象较深的一部分,感兴趣的可以看原文:

式5-1通过对滑移率求导,并且将2-8和2-9代入即可得到式5-2;推导可以见下图,不过这里有些疑问的地方在于:m表示车身质量,那在化简时,2-9中的1/4系数似乎并未体现。个人理解的推导如下图:
不过,这里相当于对滑移率的变化引入了角加速度的变化,这个推导的意义可以从角加速度和电机扭矩计算的两个角度理解:
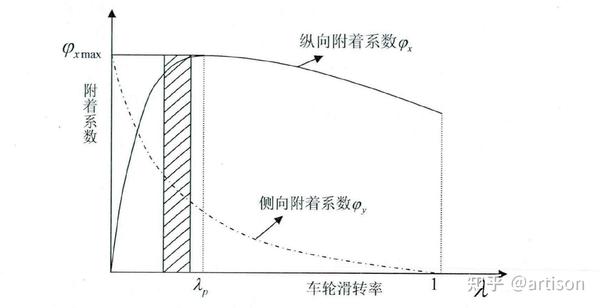
角加速度观测:在滑移率稳定在附着系数最大区域时(滑移率变化率为0),角加速度的变化不超过某个值。因此可以建立角加速度的观测器,且理想的角加速度阈值可以通过当前实际扭矩和滑移率来计算;理想输出扭矩观测:阴影区域内,即TCS理想的电机指令扭矩(综合动力性和稳定性),是否就可以认为等于角加速度变化与惯量和滑移率之间的乘积;
总结根据坐标系之间的转换,重新理解了整车动力学模型;介绍整车七自由度动力学模型横向、纵向和横摆的运动方程推导;
四个车轮的转动、四个车轮的轮心速度计算以及轮胎模型,则遗留到下篇文章进行学习总结;
参考文献:
[1] 分布式驱动电动汽车驱动防滑控制策略研究_罗浩
[2] 电动轮汽车驱动防滑控制策略的研究_占泽晟



